Le programme européen ExoMars est composé de trois parties : une sonde du nom de Trace Gas Orbiter – ou TGO – qui a été mise en orbite autour de Mars, une sonde qui s’appelle Schiaparelli et qui devait atterrir à la surface de Mars, et enfin Rosalind Franklin, un rover qui sera lancé dans les années à venir. Aujourd’hui, je vais vous parler de Schiaparelli, l’atterrisseur qui a atterri un peu plus violemment que prévu.
Giovanni Schiaparelli était un astronome du 19e siècle qui a étudié la planète Mars. Il a notamment profité d’un rapprochement entre la Terre et Mars pour tracer des cartes de la surface martienne. A l’époque, il pensait que les bandes sombres qu’il voyait pouvaient être liées à la présence d’eau en surface. Aujourd’hui, on sait que ces bandes sont liées à la répartition de la poussière. C’est en hommage à cet astronome que l’agence spatiale européenne a baptisé l’atterrisseur du programme ExoMars.
Se poser sur Mars, c’est pas facile. Tout doit se faire de façon automatique car il y a plusieurs minutes de décallage entre le moment où on envoie une commande et le moment où la sonde reçoit la commande. Et beaucoup, beaucoup, de choses peuvent aller de travers. En 2016, l’agence spatiale européenne n’avait encore jamais réussi à poser une sonde à la surface martienne. Elle avait déjà essayé avec la sonde Mars Express, mais ses panneaux solaires ne se sont pas déployés
Schiaparelli a donc été conçu comme un démonstrateur de technologie : il s’agissait avec cette sonde de tester les instruments et les techniques permettant de se poser sur Mars en toute sécurité. Elle a été envoyée en même temps que TGO. Schiaparelli était en quelque sorte la partie low-cost de la mission, qui ne devait fonctionner que pendant que quelques heures, tandis que TGO continue de fonctionner aujourd’hui.
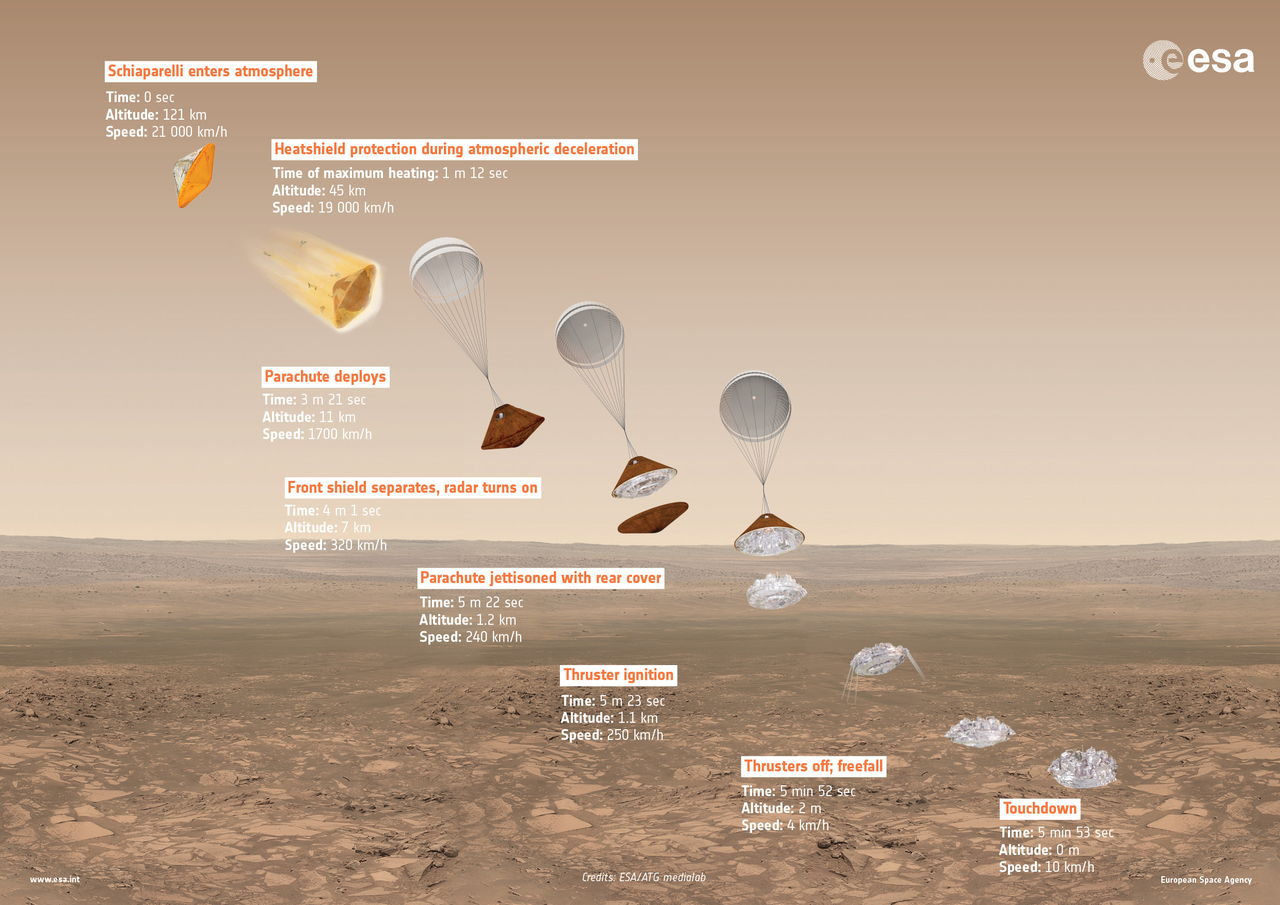
TGO et Schiaparelli sont lancés en mars 2016 à bord d’une fusée Proton et arrivent en orbite autour de Mars en octobre de la même année. Schiaparelli commence alors sa descente dans l’atmosphère martienne. La séquence d’atterrissage était en théorie semblable à celle effectuée auparavent par les sondes Viking et Phoenix : le bouclier thermique protège la sonde au début de la descente. Lorsque la sonde a perdu assez de vitesse avec les frottements atmosphériques, un parachute se déploie. Puis le bouclier thermique est largué, ainsi que le parachute, et la sonde termine sa descente avec des petits propulseurs.
Enfin, ça c’était le plan.
Pour que Schiaparelli puisse connaître son orientation et sa position, il y avait à bord une centrale intertielle aussi appelée MIMU, ainsi qu’un radar qui s’allumait un peu plus tard lors de la descente. MIMU donne l’évolution de la vitesse et de la rotation de la sonde au cours du temps. En suivant l’évolution de ces paramètres au cours du temps, on peut en déduire la position et l’orientation de la sonde à n’importe quel moment.
Sauf que MIMU ne fonctionnait correctement que si la vitesse de rotation était suffisamment faible. Si la sonde tournait trop vite sur elle-même, alors MIMU saturait et renvoyait des mesures qui étaient fausses. Normalement, ce cas de figure ne devrait pas se produire, mais par précaution, l’équipe qui travaille sur la mission s’intéresse quand même à ce qui pourrait se passer.
En cas de saturation, MIMU envoit un signal pour indiquer qu’elle bouge trop et se met en standby pendant 15 millisecondes. En soi, c’est pas hyper grave, ça peut être géré par le logiciel. Sauf que les ingénieurs ne testent pas ce qui se passe quand la sonde est secouée, et ne se rendent donc pas compte que contrairement à ce qui est écrit dans la documentation, MIMU se met en standby pendant 1 seconde complète, et non pas 15 millisecondes. Première erreur…
Le déploiement d’un parachute, c’est un phénomène complexe avec de nombreuses incertitudes : les rafales de vent, la torsion des cables du parachute, etc. C’est donc très difficile à modéliser pour prédire exactement ce qui va se passer. Pas de chance, pendant que le parachute se déploie, la sonde est secouée dans tous les sens et MIMU sature. La secousse dure quelques millisecondes, mais il faut une seconde à MIMU avant de recommencer à prendre des mesures.
Pendant ce temps, la sonde pensait qu’elle tournait sur elle-même. Lorsque MIMU reprend du service, la sonde est stabilisée dans une configuration normale, mais le logiciel pense que la sonde est à l’envers.
Suivant la procédure, le bouclier thermique est largué. L’antenne radar qui était cachée en dessous peut alors mesurer la distance qui sépare la sonde du sol. Le radar indique que la sonde est à 4 km du sol. Sauf que la sonde pense toujours être à l’envers. avec le dessous de la sonde pointé vers le haut. Le logiciel en déduit que la sonde est 4 km sous la surface martienne.
Moins quatre kilomètres, c’est inférieur à la hauteur à laquelle la sonde doit passer à l’étape suivant de la séquence d’atterrissage. Les rétro-fusées sont donc enclenchées, puis éteintes, et Shiaparelli, fait une chute libre de presque 4 km en 37 secondes. Le cratère formé par l’impact est même visible depuis l’orbite martienne !
Cette mission – bien que pas très réussie – a été très instructive pour l’ESA. Pour les prochaines missions, il faudra
- mieux modéliser le déploiement du parachute,
- gérer correctement la saturation du MIMU,
- faire plus de tests au sol pour vérifier la robustesse du système,
- croiser les informations issues de plusieurs instruments de mesure au cas où l’un d’entre eux buggue,
- et mieux gérer le recours aux sous-traitants.
C’est toujours décevant quand une mission spatiale se passe mal, mais si le MIMU avait fonctionné comme prévu, la sonde aurait vraisemblablement atterri sans souci et les autres problèmes n’auraient pas été découverts. Schiaparelli a donc rempli sa principale mission : aider à ce que les missions futures se posent en sécurité sur Mars.
Pour aller plus loin :